Robotik ist einer der deutlichsten Ausdrücke der Vision von Industrie 4.0 — digitale Steuerung, intelligente Sensorik, Echtzeitkommunikation und physische Manipulation verschmelzen in einem einzigen automatisierten System. Trotz jahrzehntelanger Fortschritte war die Entwicklung industrieller Robotik historisch jedoch durch proprietäre Architekturen eingeschränkt: geschlossene Hardwareplattformen, herstellergebundene Protokolle und starre Steuerungssoftware begrenzten die Möglichkeiten von Ingenieuren beim Entwickeln, Integrieren und Erweitern von Systemen. Die Robot Control Solution von NEXCOM, basierend auf der offenen NexROBO-Plattform und der EtherCAT-Feldbustechnologie, verändert diese Gleichung grundlegend — und gibt Systemintegratoren und Maschinenbauern die Freiheit, Robotersysteme ohne Spezifikations-Lock-in zu entwickeln, zu konfigurieren und zu erweitern.
Warum industrielle Robotik eine offene Architektur benötigt
Industrielle Robotersysteme — unabhängig von ihrer physischen Form — teilen sich eine gemeinsame Reihe von Subsystemen: einen Roboterkörper für raue Umgebungen, einen Controller für Sensorik, Motoransteuerung und Bewegungsalgorithmen sowie eine Kommunikationsschicht zur Verbindung aller Komponenten. Traditionell wurden all diese Ebenen von einem einzigen Roboterhersteller bereitgestellt und kontrolliert, wodurch Systemintegratoren gezwungen waren, vollständig innerhalb des jeweiligen Hersteller-Ökosystems zu arbeiten.
Dieser Ansatz verursacht erhebliche praktische Probleme. Wenn eine Produktionslinie Roboter verschiedener Hersteller benötigt, wird die Integration in eine gemeinsame Steuerungsebene zu einem großen Engineering-Aufwand. Das Hinzufügen neuer Funktionen — etwa Machine Vision, Fördersysteme oder Remote-I/O — erfordert häufig zusätzliche proprietäre Hardware. Und wenn eine bestimmte Komponente abgekündigt wird oder eine neue Generation von Sensoren oder Antrieben verfügbar ist, kann die Migration den kompletten Neuaufbau der Steuerungsarchitektur erforderlich machen.
NEXCOMs Antwort darauf ist die NexROBO-Plattform: eine offene, modulare, EtherCAT-basierte Robotik-Steuerungslösung, die Robotersysteme in diskrete, austauschbare Module aufteilt — und Ingenieuren die Freiheit gibt, genau die Kombination aus Hardware und Software auszuwählen, die optimal zu ihrer Anwendung passt.
Die vollständige Architektur einer robotergestützten Produktionslinie
Eine vollständige robotergestützte Produktionslinie umfasst weit mehr als nur den Roboter selbst. Die Lösung von NEXCOM deckt die gesamte Systemarchitektur ab — von Roboterkörper und Controller bis hin zu den unterstützenden Systemen, die die Produktionslinie vervollständigen:
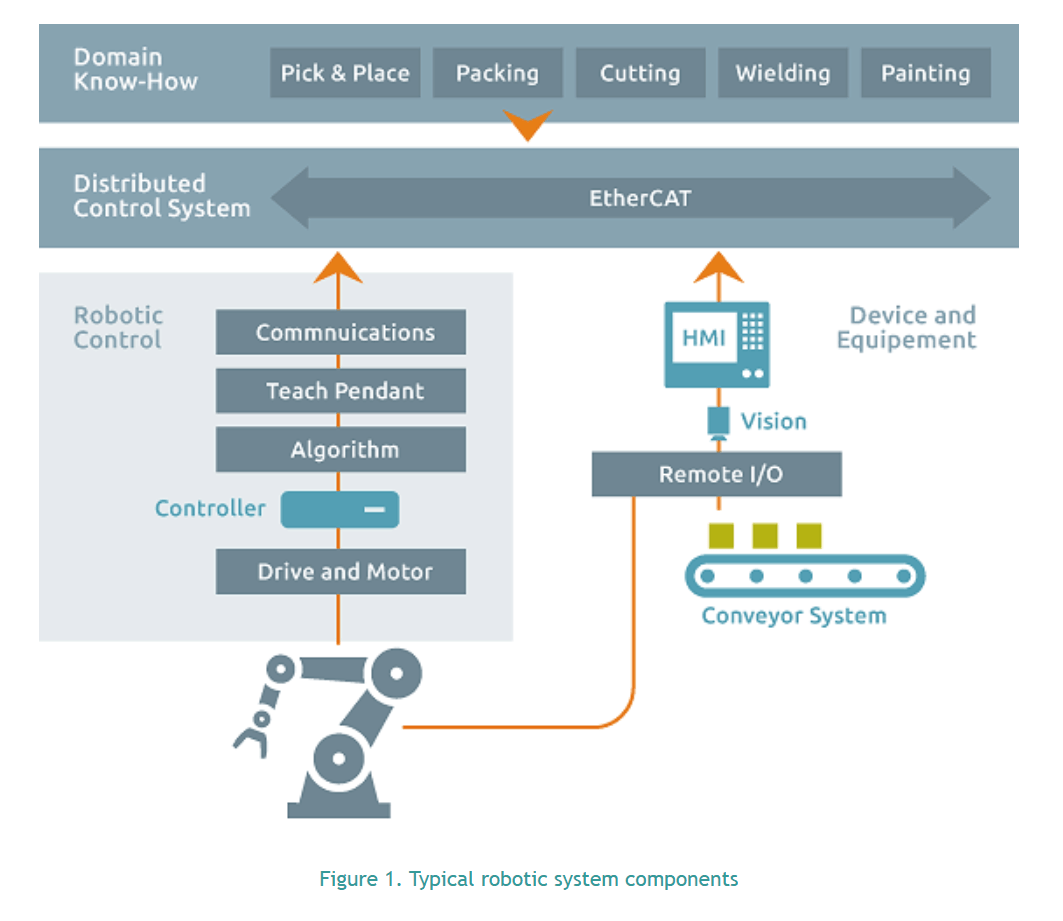
Roboterkörper
Hochfeste Materialien, entwickelt für raue Industrieumgebungen. Führt Schweiß-, Lackier-, Verpackungs-, Inspektions- und andere Fertigungsaufgaben aus.
Roboter-Controller
PC-basiertes Steuerungssystem für Sensorik, Motorsteuerung, Bewegungsalgorithmen, Remote-Teaching und Netzwerkkommunikation über EtherCAT.
Kommunikation
EtherCAT-Feldbus für deterministischen Hochgeschwindigkeits-Datenaustausch zwischen Controller, Antrieben, I/O und allen verteilten Subsystemen.
Remote-I/O
EtherCAT-basierte Peripheriemodule zur Kommunikation mit Sensoren, Aktoren und industriellen Netzwerken in der gesamten Fabrik.
Vision-Inspektion
Industriekameras für Mustererkennung, Barcode-Scanning, Fehlererkennung und Messaufgaben — direkt in die Robotersteuerung integriert.
HMI
Panel-PCs ermöglichen Bedienern die Interaktion mit Produktionsanlagen, die Visualisierung des Roboterstatus und die Anpassung von Parametern in Echtzeit.
Teach Pendant
Handheld-Gerät zur direkten Roboterprogrammierung und Bewegungsanlernung auf dem Shopfloor, kompatibel mit dem NexROBO-Control-Stack.
Fördersystem
Anlagen zum Transport von Gütern entlang der Produktionslinie, koordiniert über dasselbe EtherCAT-Steuerungsnetzwerk wie die Robotik-Subsysteme.
NexROBO: Die offene modulare Robotersteuerungsplattform
NexROBO ist die vorintegrierte und vorvalidierte Robotik-Steuerungslösung von NEXCOM. Anstatt ein monolithisches, geschlossenes Robotersystem bereitzustellen, zerlegt NexROBO die Roboterarchitektur in diskrete, validierte Hardware- und Softwaremodule. Systemintegratoren und Robotikingenieure können aus einem breiten Portfolio von NEXCOM EtherCAT-Master-Controllern, Roboterarmen, Servoantrieben, Motoren, I/O-Modulen, Industriekameras und Teach Pendants wählen — und genau die Kombination auswählen, die den Anforderungen ihrer Anwendung entspricht, statt sich auf die Vorgaben eines einzelnen Herstellers beschränken zu müssen.
Das modulare Design bedeutet außerdem, dass das Hinzufügen neuer Funktionen — etwa einer zusätzlichen Kamera, einer weiteren Achse oder eines neuen Sensortyps — lediglich die Auswahl und Verbindung des passenden EtherCAT-Slave-Moduls erfordert, anstatt die gesamte Steuerungsarchitektur neu zu entwickeln. Aufbau, Erweiterung und Rekonfiguration von NexROBO-basierten Robotern werden durch die standardisierte EtherCAT-Kommunikationsschicht erheblich vereinfacht.
NexECM: Die EtherCAT-Master-Entwicklungsplattform
Das Herzstück des NexROBO-Software-Ökosystems ist NexECM — die EtherCAT-Master-Entwicklungsplattform von NEXCOM. NexECM bietet vorvalidierte Kompatibilität und reibungslose Kommunikation zwischen NEXCOM EtherCAT-Master-Controllern und EtherCAT-Slave-Modulen verschiedener Hersteller. Dadurch entfällt der zeitaufwändige Integrations- und Kompatibilitätstest beim Mischen von Komponenten unterschiedlicher Anbieter.
Besonders wichtig: NexECM enthält bereits vorgefertigte Steuerungsalgorithmen und Embedded-APIs für die drei am häufigsten eingesetzten Industrierobotertypen — wodurch der Softwareentwicklungsaufwand erheblich reduziert wird:
- 6-Achs-Knickarmroboter — die häufigste Konfiguration für Schweißen, Montage, Materialhandling und Maschinenbeschickung.
- SCARA-Roboter — optimiert für schnelle Pick-and-Place-Anwendungen in Elektronikfertigung und Verpackung.
- Delta-Roboter (3-/4-Achs) — entwickelt für extrem schnelle Parallelkinematik-Anwendungen in Lebensmittelverarbeitung, Pharma-Verpackung und leichter Montage.
NexECM unterstützt sowohl C/C++ als auch IEC 61131-3-Programmierung und gibt Ingenieuren damit die Flexibilität, in ihrer bevorzugten Entwicklungsumgebung zu arbeiten. Entwickler mit PLC-/SPS-Hintergrund können IEC-61131-3-Bibliotheken und bestehenden Code weiterverwenden, während Softwareentwickler C/C++ für individuelle Algorithmen nutzen können. Diese Dual-Language-Unterstützung ist besonders wertvoll in Unternehmen, in denen Automatisierungsingenieure und Softwareentwickler gemeinsam an Robotiksystemen arbeiten.
Unterstützte Robotertypen und Anwendungen
| Robotertyp | Achsen | Typische Anwendungen |
|---|---|---|
| Knickarmroboter | 6-Achs | Schweißen, Lackieren, Verpacken, Montage, Maschinenbeschickung, Inspektion |
| SCARA | 4-Achs | High-Speed Pick-and-Place, Elektronikmontage, PCB-Handling |
| Delta | 3-/4-Achs | Lebensmittelverpackung, pharmazeutische Sortierung, leichte Hochgeschwindigkeitsmontage |
| Kollaborative Roboter (CoBot) | Variiert | Mensch-Roboter-Kollaboration in Produktionslinien, Unterstützung bei Qualitätsinspektionen |
| Humanoid / Quadruped | Multi-Achs | Fortschrittliche Automatisierung, Inspektion, Logistik — unterstützt durch Dual-EtherCAT-Master-AI-Controllerplattform |
NexROBO Simulator: Entwicklung und Tests ohne physische Hardware
Eines der praktisch wertvollsten Werkzeuge im NexROBO-Ökosystem ist der NexROBO Simulator — eine kostenlos herunterladbare Software, die den vollständigen Betrieb eines 6-Achs-Knickarmroboters simuliert, einschließlich Trajektoriensimulation und Bewegungsnachbildung, ohne dass ein physischer Roboterarm erforderlich ist.
Ingenieure können bis zu sechs EtherCAT-Antriebe und Motoren verbinden, um Roboterfunktionen bereits im Simulator zu testen und zu validieren, bevor physische Hardware eingesetzt wird. Dadurch entfallen Kosten und Risiken beim Einsatz echter Roboterarme für frühe Algorithmus- und Steuerungstests. Entwickler können sich vollständig auf Applikationslogik und Roboterprogrammierung konzentrieren, anstatt Zeit für Motorantriebs- und Controllerkonfiguration aufzuwenden. Jede Steuerungsanwendung, die Vorabtests erfordert, kann vollständig simuliert und validiert werden, bevor sie auf dem realen Produktionssystem implementiert wird.
EtherCAT: Warum es der ideale Feldbus für Robotik ist
EtherCAT (Ethernet for Control Automation Technology) ist das IEC-standardisierte Echtzeit-Ethernet-Protokoll, das die gesamte NexROBO-Architektur bildet. Die Wahl von EtherCAT ist kein Zufall — EtherCAT besitzt spezifische technische Eigenschaften, die es besonders geeignet für Robotik- und Motion-Control-Anwendungen machen:
- Deterministische Zeitsteuerung — die verteilte Clock-Architektur von EtherCAT synchronisiert alle Steuerungsknoten mit einer Genauigkeit im Submikrosekundenbereich und ermöglicht dadurch präzise koordinierte Mehrachsbewegungen.
- Hochgeschwindigkeits-Datenaustausch — ein einzelner EtherCAT-Frame kann Hunderte von Nodes in einem einzigen Buszyklus bedienen und Zykluszeiten von bis zu 100 Mikrosekunden erreichen.
- Einfache Verkabelungstopologie — Standard-Ethernet-Kabel verbinden Geräte in Linien-, Ring- oder Baumtopologien ohne zusätzliche Switches oder Hubs und vereinfachen dadurch die Verkabelung im Produktionsumfeld.
- Offener Standard mit großem Ökosystem — EtherCAT ist ein IEC-Standard (IEC 61158/IEC 61784) mit Hunderten zertifizierter Slave-Gerätehersteller und ermöglicht die freie Auswahl kompatibler Antriebe, I/O-Module und Sensoren.
- Skalierbarkeit — zusätzliche Achsen, I/O-Module oder Steuerungsknoten können ohne Änderungen an der Netzwerkinfrastruktur ergänzt werden; lediglich neue Slave-Geräte werden hinzugefügt.
Integration in die Smart Factory
NexROBO-basierte Robotersysteme sind keine isolierten Einheiten — sie wurden speziell für die Integration in moderne Smart-Factory-Infrastrukturen entwickelt. Über das NEXCOM IoT Automation Solution Framework können Roboterzellen mit MES-Systemen (Manufacturing Execution Systems), SCADA-Plattformen, Cloud-Analytics und ERP-Systemen über standardisierte Industrieprotokolle verbunden werden. Die Integration der NexAIoT-Plattform und der Microsoft Azure IoT Suite ermöglicht Echtzeit-Produktionsüberwachung, Predictive Maintenance und datengetriebene Optimierung robotergestützter Prozesse auf Unternehmensebene.
Machine-Vision-Integration wird nativ unterstützt — Kameras, die über EtherCAT oder direkt mit dem Robotercontroller verbunden sind, können Inspektionsdaten in Echtzeit in die Entscheidungslogik des Roboters einspeisen und so Closed-Loop-Qualitätskontrolle ohne externe Vision-PCs ermöglichen. Für besonders anspruchsvolle KI-basierte Vision-Workloads kombiniert der neueste Dual-EtherCAT-Master-AI-Robotercontroller von NEXCOM — basierend auf der NVIDIA Jetson AGX Orin Plattform — Echtzeit-Motion-Control und GPU-beschleunigte KI-Inferenz in einem einzigen System.
Integration in die Smart Factory
NexROBO-basierte Robotersysteme sind keine isolierten Einheiten — sie wurden für die Anbindung an umfassende Smart-Factory-Infrastrukturen entwickelt. Über das NEXCOM IoT Automation Solution Framework können Roboterzellen über standardisierte Industrieprotokolle mit MES-Systemen (Manufacturing Execution Systems), SCADA-Plattformen, Cloud-Analytics-Lösungen und ERP-Systemen verbunden werden. Die Integration der NexAIoT-Plattform von NEXCOM sowie der Microsoft Azure IoT Suite ermöglicht Echtzeit-Produktionsüberwachung, Predictive-Maintenance-Benachrichtigungen und datenbasierte Optimierung robotergestützter Prozesse auf Unternehmensebene.
Die Integration von Machine Vision wird nativ unterstützt — Kameras, die mit dem EtherCAT-Netzwerk oder direkt mit dem Robotercontroller verbunden sind, können Inspektionsergebnisse in Echtzeit in die Entscheidungslogik des Roboters einspeisen und dadurch eine Closed-Loop-Qualitätskontrolle ohne externe Vision-PCs ermöglichen. Für besonders anspruchsvolle KI-basierte Vision-Workloads kombiniert der neueste Dual-EtherCAT-Master-AI-Robotercontroller von NEXCOM — basierend auf der NVIDIA Jetson AGX Orin Plattform — Echtzeit-Motion-Control mit GPU-beschleunigter KI-Inferenz in einem einzigen System.
Zugehörige NEXCOM-Produkte verfügbar bei IPC2U
-
NEXCOM ECM-S110A01-X — Intel x86 Motion Controller (EtherCAT)
Lüfterloser EtherCAT-Robotercontroller mit Intel N97 3,6 GHz, 8 GB DDR5, 128 GB M.2 SSD, HDMI/DP, 3× 2.5GbE LAN, 4× COM, USB 3.2 + 2.0, optionalem 8-Bit-GPIO, Mini-PCIe (mSATA/Wi-Fi/LTE), 9–30 VDC Eingang. Ausgeliefert mit Ubuntu 22.04 + NexRTOS Echtzeitbetriebssystem. -
NEXCOM NIFE-200 — Industrieller Fieldbus Embedded Computer
Intel Celeron J1900, bis zu 8 GB DDR3L, 2× GbE LAN, 2× Mini-PCIe für EtherCAT / PROFIBUS / PROFINET / CANopen / DeviceNET Module, 24V DC Eingang, -10°C bis +60°C. Basis-Controllerplattform für CODESYS SoftMotion und NexROBO-Anwendungen. -
NEXCOM SoftMotion Starter Kit
Einsatzbereites Tutorial-Paket inklusive NIFE-200 Controller, CODESYS-Software, EtherCAT-Koppler, 8-Kanal-DI-Modul, 8-Kanal-DO-Modul, Netzteil und Quick Start Guide. Ideal für die praktische Evaluierung von EtherCAT SoftMotion Control in Robotik- und Maschinenautomatisierungsprojekten. -
NEXCOM MiniBOT Robot Package
Einsteigerpaket für 6-Achs-Knickarmroboter mit EtherCAT-Kommunikation, offenem Robotercontroller (Intel Celeron J1900), Visual C/C++ API, 500 GB HDD sowie DP- und DVI-I-Displayausgängen. Geeignet für F&E, Ausbildung und Prototypenentwicklung. -
NEXCOM NexROBO SCARA Edu Package — SCARA-Roboterlösung
EtherCAT-basierte SCARA-Roboterlösung für Ausbildung und Entwicklung in High-Speed-Pick-and-Place- sowie Montageanwendungen. Offener Robotercontroller mit NexROBO-Software, vorvalidierter EtherCAT-Kommunikation und C/C++-API-Unterstützung für individuelle Roboteranwendungen. -
NEXCOM NEIO-1812 — Industrielles EtherCAT Digital-I/O-Modul
EtherCAT-Slave-Modul mit 16× digitalen Eingängen und 16× digitalen Ausgängen, IP20, 2× 100BASE-TX, 24 VDC Eingang, -5°C bis +60°C. Eingesetzt als verteilte I/O-Node in NexROBO-basierten robotergestützten Produktionslinien. -
NEXCOM IoT Automation Solutions bei IPC2U
Vollständiger Überblick über das IoT-Automatisierungs- und Robotik-Steuerungsökosystem von NEXCOM — inklusive NIFE-Controller, EtherCAT-I/O-Module, Panel-PCs, IoT-Gateways und Integration mit SCADA-, MES- und Cloud-Plattformen. Pre-Sales-Beratung und Projektunterstützung verfügbar. -
NEXCOM — Offizielle IPC2U-Partnerseite
IPC2U arbeitet seit über 25 Jahren mit NEXCOM zusammen. Vollständiges Portfolio, technische Pre-Sales-Beratung, OEM/ODM-Customization-Support, Lifecycle-Management und schnelle Lieferung innerhalb Europas.
Zusammenfassung
Die Robot Control Solution von NEXCOM — basierend auf der NexROBO-Plattform, dem NexECM-Development-Stack und dem EtherCAT-Feldbus — bietet Systemintegratoren und Maschinenbauern eine wirklich offene und modulare Grundlage für industrielle Robotik. Durch die Aufteilung von Robotersystemen in vorvalidierte, austauschbare Hardware- und Softwaremodule werden Spezifikations-Lock-ins eliminiert, der Integrationsaufwand reduziert und Entwicklungsteams können sich auf ihre Applikationslogik konzentrieren statt auf Low-Level-Controller- und Kommunikationsintegration. Die Unterstützung für 6-Achs-Knickarm-, SCARA- und Delta-Roboter, kombiniert mit Dual-Language-Programmierung (IEC 61131-3 und C/C++), Machine-Vision-Integration und einem kostenlosen Simulator-Tool, macht NexROBO zu einer der vollständigsten und zugänglichsten offenen Robotikplattformen für Industrie-4.0-Anwendungen.
IPC2U bietet das vollständige Portfolio an NEXCOM Robot-Control- und EtherCAT-Automatisierungsprodukten — mit über 25 Jahren Partnerschaftserfahrung, technischer Pre-Sales-Beratung und schneller Lieferung innerhalb Europas.

